
Энкодер Sick DBS36E-S3EM01000
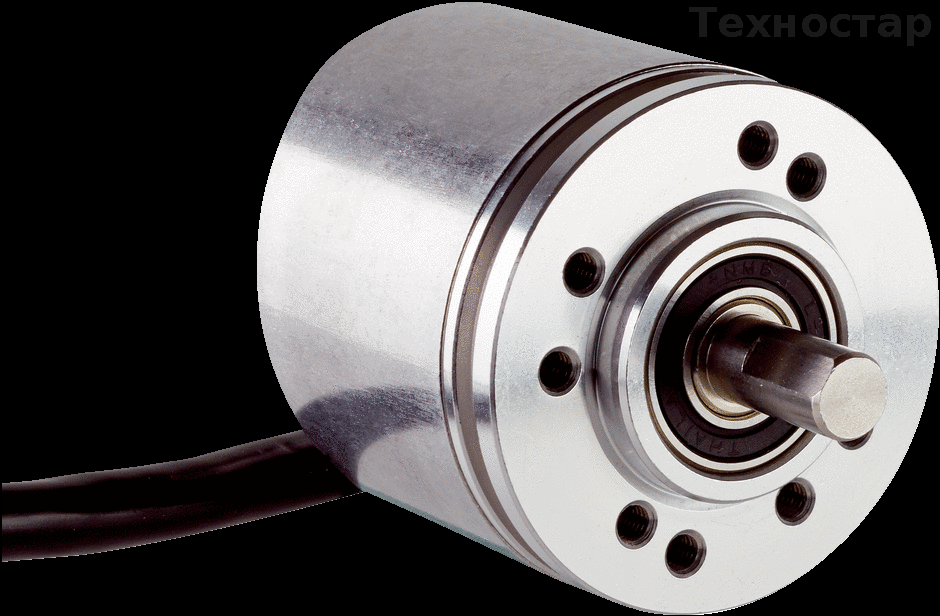
Энкодер SICK DBS36E-S3EM01000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 6 мм.


В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется прижимной. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 7-30 dc; формат выходных сигналов — htl / push pull.
Энкодер SICK DBS36E-S3EM01000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 6 мм.