


Инкрементальные энкодеры SICK

Отличная концентричность и исключительная надежность достигаются благодаря большому расстоянию между подшипниками, несущими вал энкодера. Электрическая изоляция между валом двигателя и энкодером со сквозным валом является особенностью, которая существенно повышает помехоустойчивость и надежность. Поэтому энкодеры могут использоваться в жестких рабочих условиях в любой отрасли промышленности.
Энкодер Sick DFS60B-S1EK00045

Энкодер SICK DFS60B-S1EK00045 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 6 мм. В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется синхрофланец. Технические характеристики: питание — 10-32 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DFS60B-S4EA01000

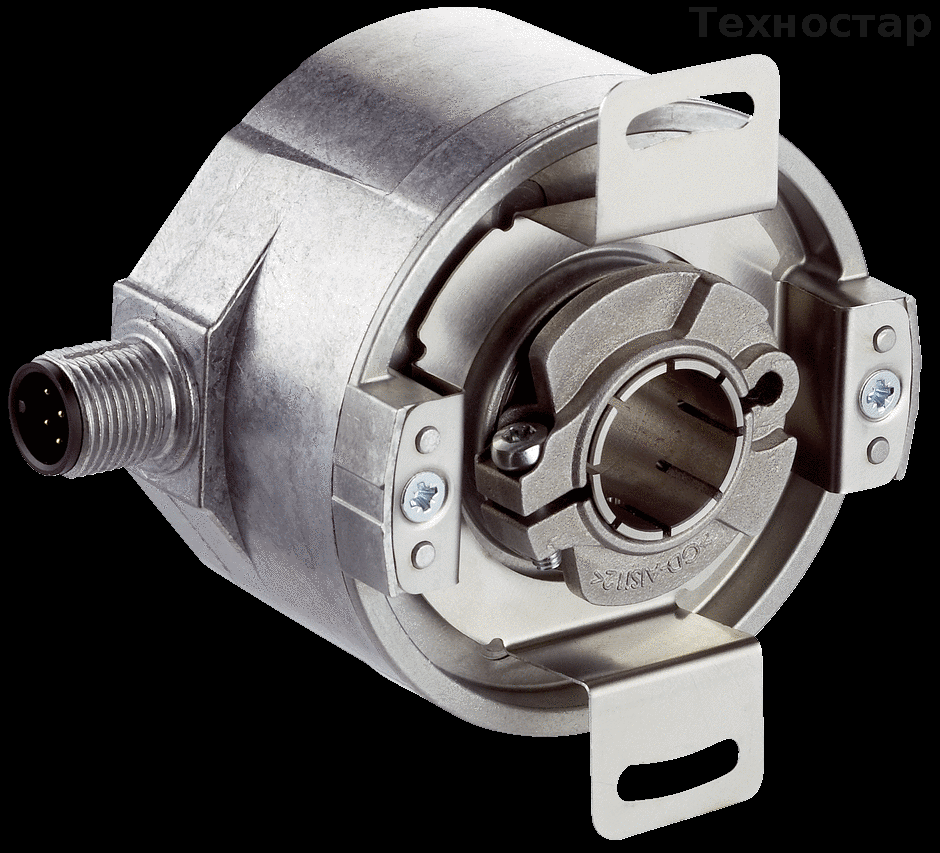
Энкодер SICK DFS60B-S4EA01000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 10 мм. В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется прижимной. Электрическое соединение выполняется через фланцевый разъем, тип — радиальное. Технические характеристики: питание — 10-32 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DFS60B-S4PA10000
• Компактный корпус Ø 60 мм
• Разрешение 1...65536, ширина нулевого импульса и уровень выходного сигнала программируется заказчиком
• Радиальный разъем М12 и М23, универсальный кабель
• Торцевой фланец или сервофланец
• Полый или сквозной полый ротор диаметром до 15 мм или 5/8 дюйма, наличие моделей с электрической изоляцией
• Электронная установка нуля
Энкодер Sick DFS60B-TGEK01024

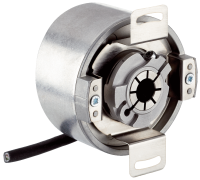
Энкодер SICK DFS60B-TGEK01024 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый сквозной вал диаметром 14 мм. В основе работы датчика находится инкрементальный принцип. Технические характеристики: питание — 10-32 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DFS60B-THEC01024
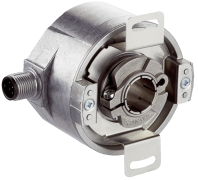
Энкодер SICK DFS60B-THEC01024 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый сквозной вал диаметром 15 мм. В основе работы датчика находится инкрементальный принцип. Электрическое соединение выполняется через фланцевый разъем, тип — радиальное. Технические характеристики: питание — 10-32 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DFS60B-BBAK10000

Энкодер SICK DFS60B-BBAK10000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый глухой вал диаметром 8 мм. В основе работы датчика находится инкрементальный принцип. Технические характеристики: питание — 4,5-5,5 dc; формат выходных сигналов — ttl / rs-422.
Энкодер Sick DFS60B-S1EK00045
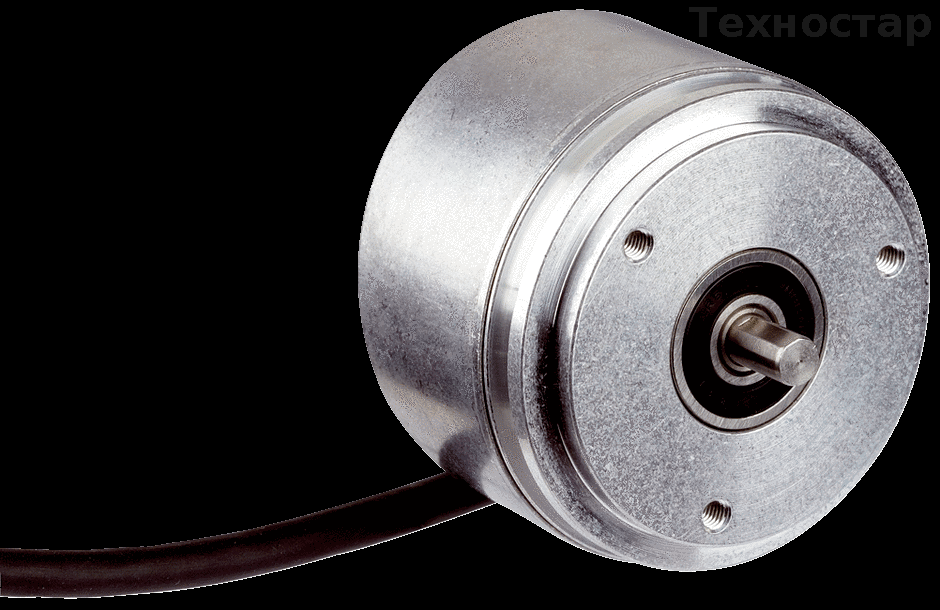
Энкодер SICK DFS60B-S1EK00045 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 6 мм. В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется синхрофланец. Технические характеристики: питание — 10-32 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DFS60B-S4EA01000

Энкодер SICK DFS60B-S4EA01000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 10 мм. В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется прижимной. Электрическое соединение выполняется через фланцевый разъем, тип — радиальное. Технические характеристики: питание — 10-32 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DFS60B-S4PA10000

• Компактный корпус Ø 60 мм
• Разрешение 1...65536, ширина нулевого импульса и уровень выходного сигнала программируется заказчиком
• Радиальный разъем М12 и М23, универсальный кабель
• Торцевой фланец или сервофланец
• Полый или сквозной полый ротор диаметром до 15 мм или 5/8 дюйма, наличие моделей с электрической изоляцией
• Электронная установка нуля
Энкодер Sick DFS60B-TGEK01024

Энкодер SICK DFS60B-TGEK01024 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый сквозной вал диаметром 14 мм. В основе работы датчика находится инкрементальный принцип. Технические характеристики: питание — 10-32 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DFS60B-THEC01024
Энкодер SICK DFS60B-THEC01024 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый сквозной вал диаметром 15 мм. В основе работы датчика находится инкрементальный принцип. Электрическое соединение выполняется через фланцевый разъем, тип — радиальное. Технические характеристики: питание — 10-32 dc; формат выходных сигналов — htl / push pull.